Copyright 2015-2024 多趣味 版權(quán)所有 京ICP備2015051670號
11月,鴻蒙智行推出了年度壓軸新品——享界S9。這款車型搭載了旗艦級的智駕硬件,標(biāo)配包括4顆激光雷達(dá)在內(nèi)的36個高精度傳感器,并升級了華為乾崑智駕ADS 4系統(tǒng)。
從理論上說,這意味著你只需花費(fèi)30萬級的價格,就能體驗(yàn)到與50萬級的問界M9、甚至百萬級的尊界S800同款的旗艦輔助駕駛系統(tǒng)。
加這么多傳感器能解決哪些問題?
和同樣主打智能化的明星車型——理想L9、特斯拉Model Y相比,誰才是手握30萬預(yù)算的智能發(fā)燒友的最優(yōu)選?

我們設(shè)置了一些手動駕駛很難搞定的危險場景, 看看這三臺車即將撞車或掉溝的時候,車輛智能系統(tǒng)能不能力挽狂瀾、救人一命?
x
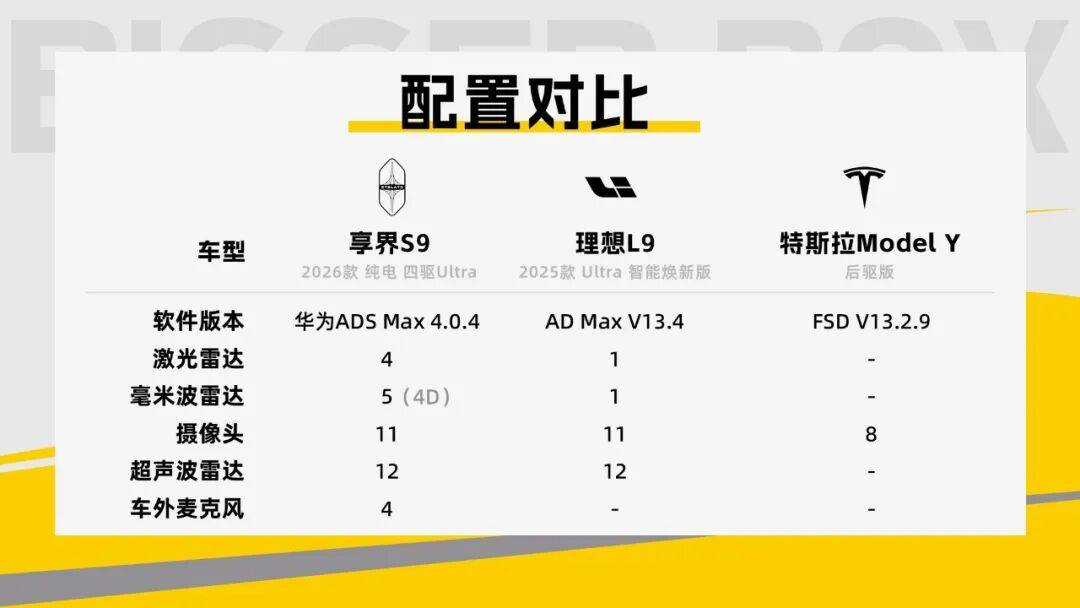
先和大家分享三臺車的硬件配置。
享界S9的4顆激光雷達(dá)除了1顆前向遠(yuǎn)視激光雷達(dá)以外,還包括2顆側(cè)向補(bǔ)盲激光雷達(dá)以及1顆后向補(bǔ)盲激光雷達(dá),和其它傳感器共同形成一個更嚴(yán)密的環(huán)繞感知系統(tǒng)。
大家看到這張圖,可能會好奇,為什么車外麥克風(fēng)也能納入感知硬件。
最基礎(chǔ)的一項(xiàng)是車外麥克風(fēng)賦予的“聽覺”,讓駕駛員可以在車內(nèi)和車外人進(jìn)行溝通。
此前有些車型也具備類似的交互功能,比如“時代的眼淚”哪吒GT,駕駛員就可以在車輛靜止時通過車外喇叭來向外發(fā)聲,但這樣的體驗(yàn)是單向的,駕駛員仍然無法聽到對方的聲音,而且這個功能只能單一使用,個人感覺更偏向于趣味性的嘗試。
而鴻蒙智行車型的車外麥克風(fēng)可以在行車、泊車時和車外人交流,成為車輛完成駕駛動作的一部分。
通過聲紋加密,它還可以識別車主的聲音,提供召喚泊車、控制車門與尾門等功能。
也許車外麥克風(fēng)在以后還可以識別救護(hù)車等特種車輛的警報(bào)聲,使得智能駕駛系統(tǒng)能夠避讓。
主動安全
回歸到用車場景,我們進(jìn)行了前向、側(cè)向、后向的遇障還原,考查車輛對各種高發(fā)危險場景的應(yīng)對能力。
前向
先來挑戰(zhàn)一道行業(yè)級難題:消失的前車。
前車切走暴露出一臺故障車,這是對駕駛員的反應(yīng)能力和駕駛技術(shù)的雙重考驗(yàn),高速狀態(tài)下很多人都措手不及。
對于車輛的主動安全系統(tǒng)來說,系統(tǒng)要確認(rèn)前車正在切出,再識別新暴露出的靜止目標(biāo),然后迅速判斷目標(biāo)距離、位置并預(yù)算本車速度下的碰撞風(fēng)險,再采取措施,這對傳感器刷新率和算法實(shí)時性提出極高要求。
那么當(dāng)人駕狀態(tài)下遇到這種情況,三車會怎么發(fā)揮?先來看測試結(jié)果:

圖中的AES和eAES指的都是系統(tǒng)通過打方向的方式繞開了障礙物,功能本質(zhì)相同,不同車企命名不同。
三車在100km/h的情況下居然都能避免碰撞,其中享界S9觸發(fā)AEB是因?yàn)樗愠鼍嚯x足夠剎停,而特斯拉Model Y的主動安全系統(tǒng)并沒有開發(fā)避讓功能,只能剎停。
所以大家可以看到,當(dāng)車速上到110km/h后,特斯拉Model Y仍然是觸發(fā)AEB,但制動力度和制動距離都無法避免這次碰撞,只是減輕了碰撞的力度。
而享界S9改變了策略,切換為了避讓功能。
享界S9和理想L9的避讓功能都很在線,在測試封頂速度130km/h的情況下,雙雙完成避讓。

不過理想L9會稍微更極限一些,而享界S9在避讓同時還保持著超穩(wěn)定的車身姿態(tài),方向盤完成了一個利落的變道動作,經(jīng)過障礙車時已經(jīng)像“沒事車”一樣,基本恢復(fù)居中行駛了。

側(cè)向
危險不會只在前方,來看側(cè)向遇障的情況,我們這次測了兩種。

尤其是防掉溝功能,簡直是解決泡水車危機(jī)的神器。
比如當(dāng)我們在河邊手動駕駛時失神走偏,如果開的是享界S9,它就會認(rèn)識到掉溝危險,觸發(fā)功能立馬向內(nèi)扯一點(diǎn)方向。

除了4D毫米波雷達(dá)能識別高度信息,前向激光雷達(dá)可以預(yù)瞄車道,判斷我們自車軌跡在車道上的位置。
不過前向激光雷達(dá)對近距離稍微有點(diǎn)盲區(qū),側(cè)向補(bǔ)盲激光雷達(dá)會補(bǔ)充,判斷車輪與路沿的相對位置,避免碾壓路沿掉溝。
另外兩臺車則沒有這種功能。
后向
后向主動安全,我們還原了野外挪車場景。
當(dāng)我們在怠速倒車時,系統(tǒng)能不能幫我們把握好“倒多少”的尺度呢?

仍然是只有享界S9會觸發(fā)剎停。
車身后向搭載的固態(tài)激光雷達(dá)最小感知精度可達(dá)3厘米,能夠提供精準(zhǔn)的三維空間信息。
它比超聲波的感知精度大了不止一個量級,又比攝像頭多出縱深信息,在倒車時或泊車時能識別懸空障礙物、異形障礙物和負(fù)向障礙物。比如面對農(nóng)田,它會意識到不能接近。
另外兩車無反應(yīng)。
領(lǐng)航避險
由于車輛要降低誤觸發(fā)率,所以主動安全能針對的場景相較來說是更有限的。那么號稱“擬人”的領(lǐng)航輔助遇到危險時靠不靠譜?
我們在封閉場地還原了兩個危險項(xiàng)目,分別是夜間逆光兒童鬼探頭以及車輛近距離加塞。

夜間逆光下,人眼會受很大干擾,而且兒童鬼探頭給駕駛員的反應(yīng)時間少之又少。
好消息是,如果你的座駕是享界S9、理想L9和特斯拉Model Y中的任何一款,而且你在這種低可見度環(huán)境下開了領(lǐng)航輔助駕駛在65km/h的情況下遭遇兒童鬼探頭,那么你可以避免一次傾家蕩產(chǎn),因?yàn)檫@三臺車都能識別并觸發(fā)AEB剎停了,包括完全依賴攝像頭的特斯拉Model Y。
不過理想L9和特斯拉Model Y觸發(fā)AEB剎停后都終止了領(lǐng)航功能,而享界S9完成避障后繼續(xù)領(lǐng)航,主動安全和領(lǐng)航輔助兩套系統(tǒng)搭檔更和諧。

前車加塞,我們本來預(yù)設(shè)速度是80km/h,但由于封閉場地限速和各系統(tǒng)手動調(diào)速機(jī)制的問題,只有享界S9能推到80km/h左右,理想L9和特斯拉Model Y基本都會在場地掉到60km/h左右。
所以最終結(jié)果是,享界S9能在80km/h左右的速度減速剎停避讓加塞車把那個繞行超車,另外兩車在60km/h左右的速度減速剎停避讓了加塞車。
寫在最后
硬件是下限,決定了安全能力的廣度;而算法是上限,決定了安全體驗(yàn)的深度。
享界S9的表現(xiàn),為華為的卷硬件路線穩(wěn)穩(wěn)立住了一次臺面。
當(dāng)然,任何系統(tǒng)都無法突破物理極限,再強(qiáng)大的智駕,也只是 “降低概率”的工具 ,不是“完全解決”的魔法。所以,各位車主們還是要養(yǎng)成良好開車習(xí)慣,再選擇一款好用的智能車多拉一道安全線,那么本期視頻中的三款車,你會選擇誰呢?